MPU-6050 an Aktioun: Praktesch Guide fir Ariichten, Konfiguratioun, an Kaméidi Management
Calalog
Aféierung an MPU-6050
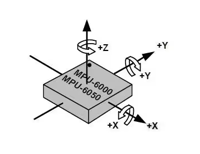
Mpu-6050 Sinn d'Welt vun der Welt déi éischt integréiert 6 - Achs Modern Bewegungskomponent, wat en 3-Axis Gitroskope integréiert, 3-Achscoretometer (DMPSORTDen Zweck vun dësem Waller ass dat ze kréienAn.Mir liesen déi sechs Daten vun der mpu-6050 (dräi-Achs Acceleration Ad Wäert an dräi-Achswarched Velokular Velok) duerch d'I2C Interface.Nodeems Dir Äders de Pacht ofgestallt, Roll, Roll, a gewiescht Wénkel kënne berechent ginn.Als eng Richtung Referenz fir Messung Wäerter, d'Definitioun vun der Sensorkordinéierendrichtung ass wéi an der Figur hei ënnendrënner folgt, déi de Prinzip-Ersatzssystem vun der reméenAxis ass den Index Fluchtelsopberosch oprannt.
Mat senge spezialiséiert I2C Denöen Bus, d'MPU-6050 ass direkt vun engem externen 3-Achsacement (Axis méiglech Asechen ™ Attack.Et huet den Diskrepanzprobleem tëscht de kombinéierte Gyroskop an affendoratoreschen Timerin a mannerverachtéiertem Package am Verglach zum MultiLon ugeet.Wann Dir zu engem dräi-Achs Magnotomter ugeet, fäheg ass, benotzt de MPU-60X vun der voll 9-Axist Fusiouns Ausschau 1.
Alternativen an Equivalenten
• MPU-3300
• Mpu-6000
• Mpu-6500
Fabrikant vum MPU-6050
Den Hiersteller vu mpu-6050 ass tdk.No deenen zwee Grënner vun TDK, Dr Yogoo Choto an Aksi, erfonnt, erfonnt, Ferfriite zu Tokyo tokyo k.ko k.ko k.ko k.Ko k.Ko k.Ko k.ko k.ko k.Ko k.1935 gouf den 2. Joer 1935. bis zu eng gegal Elektronomieindesch aler Arsch, TDK ëmmer eng doministesch Positioun an de Formialen- a elektronesche Komponterien opgehalen.Zéng Aarbecht ass och zu Innovatiounssäit vum Pierelportio Cover-Covers, esou wéi de Corrimarity, déi Temamenter and Ofgrenzant (sou datt Temaralasungsystemer "Magnéitin a Mems Senseboren ),3. Zousätzlech ginn dDU bueden d'Vollek ubidden, d'Victorsbopatiounen, d'Magnéit, Magnéit, Magnéit, Magnéit, Magnéit, Magnéit, Magnéit.Säi Produktrale enthalen TDK, Epcocos, Neistiker, Tillen, Tronic, an TDK-LAMKDA.
Intern Block Diagramm vu mpu-6050

Ënner sécher sther an SDa den I-Geschichten geflossen an den MC IQCASU-6050 waren.Et gëtt och en IIC Interface, nämlech aux_cl an Aux_da.Dëse Betrimin ka benotzt fir eng extern Skateautovatiounen ze verbannen, sou wéi Magnéitik Sensuren, fir en nuor-Achséreivor.Vlocic ass den IO Port Volt.Dëse PIN kann e Minimum vun 1,8v ënnerstëtzen.Mir verbannen normalerweis direkt op VDD.Ad0 ass d'Adress Kontroll Pin vun der Sklave Iic Interface (verbonne mam MCU).Dëse Pin kontrolléiert de niddregsten Bit vun der IIC Adress.Wann et ugeschloss gëtt fir ze beweegen, d'iesch Adress vum mpu-6050 ass 0x68;Wann et mam VDD verbonne gëtt, ass et 0x69.W.e.g. notéiert datt d'Adress hei net den ënneschten Deel vun den Datenentransmung enthält (déi ënnescht Bit gëtt benotzt fir ze representéieren an Operatiounen ze representéieren).Op der A grogpellebildc15, huet den Ad0 verknannt de GRE0, sou datt déi idesch Adress vun der MPU-6050er maacht: per niddregsten Bit) 0X68 (Auswiessel)
Initialiséieren den IIC Interface
MPU-6050 benotzt IIC fir mat stc15 ze kommunizéieren, sou datt mir d'SDA initialiséieren an Scl Datenlinnen verbonne mat MPU-6050 $ 6050.
Reset MPU-6050
Dëse Schrëtt restauréiert all Regeles am MPU-6050 op hire Standard Wäerter, déi duerchbeleen 7 bis back 7 bis Kraaftuerten heescht. "(0x6B.Nodeems Dir de Standuert vum Minakt: der MATion S: Entmanéiert hir Demande zréckgesat ginn (0340), an dëst offréiert de MPU-6050 ze kriss, an se an en normalen Erhënner muss opreegen.
Set de komplett-Skala Palette vun der Wénkelgeschwindegkeet Sensor (Gyroy) an Acceleréierend Sensor
An engem Schrëtt geléint eis Roll (Fs "Sensoren duerch d'Gyros Coo Brout ze verféieren (0x1b) respektiv.Typesch, mir setzen déi voll-Skala Gamme vum Gyroskop op ± 2000dps an déi voll-Skala Palette vum Accelerometer op ± 2g.
Setzt aner Parameteren
Nieft mussen och déi folgend folgend folgend Konfigurë konfiguréieren: Oflafen d'AUX I2C Intercoursen, deen den Gyrokope gëtt vum Gyrofiler).Well mir net Ënnerbriechunge benotzen fir Daten an dësem Kapitel ze liesen, déi Ënnerbriechungsfunktioun muss ausgeschalt ginn.Zou benotzt, wäert mer der selwechter Zäit verzaufen ginn, och eng extern Sensësch zur connuren, kënnen och dëst Interface zolidd.Dës Funktiounen kënnen duerch d'Ënnerbriechung kontrolléiert ginn, aktivéiert Iech anzeschreiwen (0x38) an User Kontrollregel (0x6a).De MPU-6050 kann fifo benotzen fir Sensor Daten ze stockéieren, awer mir hunn et an dësem Kapitel net an dëst Kapitel n'tapo Kanäl misst gespaart hunn.Dëst kann duerch de Fiveo kontrolléieren aktivéiert Registréieren (0x23).Grafat leeft de Wäert vun dësem Beruff vun dësem Regrungsfall am Fall behënnert), sou datt mir de Standard Wäert vun der Standard Wäert benotzen.De Sampling Taux vum Gyroskop gëtt kontrolléiert duerch d'Sampling Taux Divider Registréieren (0x19).Normalerweis sot mir dësen Neplpling Taux op 50. D'Konfiguratioun vum digitale Low-Passfilter (DLPF) ass duerch d'Konfiguratiounsregistratioun (0x1a).Allgemeng schwätze mir dlPf bis hallef der Bandbreedung fir Data Richtegkeet a Äntwertgeschwindegkeet ze balanséieren.
Konfiguréiert d'System Clock Quell an erlaabt d'Wénkelgeschwindegkeet Sensor an Acceleréierend Sensor
Den Organisatioun vun de System Akock Quell hänkt vun der Verschwaltung vum Muecht vum Muechtkampf ofkommen (0X6b), woubäi d'niddreg Pops vun dësem Aschlagsquell existéieren.Par défaut ginn dës dräi Stécker op 0 gesat, wat heescht datt de System den internen 8mhz RC Oscillator benotzt wéi d'Auerquell.Wéi och ëmmer, fir d'Approch Genauegkeet ze verbesseren, hunn mir se och op 1 a wielt den X-Axis Zyannereplack wéi d'Auer Quell up.Zousätzlech huet dat Wénkelätegkeet sensoresch Scheedung an engem Accondersor Sensor ass mat engem wichtege Schrëtt am Initiation am Ufankes Prozess.Béid Opatiounen méi duerchgesat ginn duerch d'Krankheet Gäertioun, déi Iech amgaang ginn (0x6c).Setzt einfach den entspriechende Bit op 0 fir den entspriechende Sensor z'aktivéieren.Nodeems Dir déi uewe genannte Schrëtt ofgeschloss hutt, kënnt de MPU-6050 net normal Aarbechtsstatus aginn.Déi Registreren, déi net speziell Set adoptéieren, déi d'Standardwahlen adoptéieren op de System.
Wéi funktionéiert d'MPU-6050 Aarbecht?
Gyro Sensor
De Segen an huet sech an der Kalroll am Kuerzong mat engem Schatz erofgerappt, wat de Parallel op déi nei Richtung Gewalt an der initescher Effektéiert bleift.Dofir kënne mir d'Richtung an dem Wénkel duerch d'Rotatioun ausrechnen duerch d'Devotatioun vum Kypy aus der initescher Richtung erlaaben ze entstanen.
Accelerometer Sensor
En Accorleomometer Sentrizgesinn ass en Apparat dat Beschreiwungsmoossname geet an et funktionnéiert op dem Prinzip vum PieOzoelecalust.Wärend der Beschleunegung, de Sensor Moossnamen déi anertialtkraaft an d'Massblock ugewandt an dann de Beschleunigungswäertung vum Newton vum Newton.
Digital Meter Prozessor (DMP)
Den DMM ass en Datementveraarbechtungsodul am MPU60.Jo-Chip deen en agebautene Kalman gegrënnt gëtt fir d'Donnéeën aus dem Gyroskapsel ze kréien an d'Ausgaben Senser ze kréien an d'Ausgabe Sensuren an d'Ausgabe Sensuren an d'Ausgabe Sensuren an d'Ausgabe Sensuren an d'Ausgabe Sensuren an d'Ausgabe Sensuren an Accès Senseberungen an Accès Sensebensmëttel an d'Ausgaben.Dës Feation ass déi vergréissert d'Vergréisserung vun der peripheraler Mikrofprozesser an evitéiert den tedialen Filteren an Daten Fusionprozess.
Notizen:
Quunner: Queer Rënzen sinn einfach superkomplett Zuelen.Komplex Zuelen besteet aus real Zuelen plus déi imaginär Eenheet, wou ech ^ 2 = -1.
Wou ass mpu-6050 benotzt?
• Spillsaachen
• Handset an portable Gaming
• Motioun-baséiert Spillkontroller
• Blurfree ™ Technologie (fir de Video / ëmmer nach Bildstabiliséierung)
• Airsign ™ Technologie (fir Sécherheet / Authentifikatioun)
• Instantsture igno ig ™ Goture Unerkennung
• wearbar Sensoren fir d'Gesondheet, Fitness a Sport
• Motioun-aktivéiert Spill an Uwendungsrahmen
• BewegungComandmand ™ Technologie (fir Geste Short-Schnëtt)
• Location-baséiert Servicer, Punkte vun Interesse, an dout Reckoning
• 3D Fermete Kontrollen fir Internet-verbonne DTVS an Set-Top Këschte, 3D Mais
• touchhany du ™ Technologie (fir "keen Touch" UI Applikatiounskontrolle / Navigatioun)
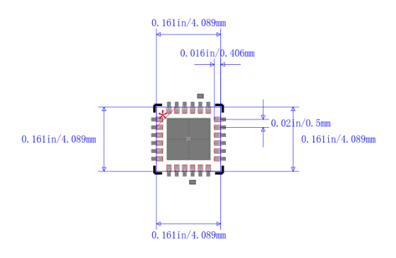
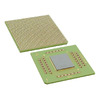
Package vun mpu-6050
Wéi reduzéieren de Kaméidi vu mpu-6050?
Mir kënnen déi folgend Weeër huelen fir d'Kaméidi vu MPU-6050 ze reduzéieren:
Benotzt kalibréiert Sensoren: Kalibréierend dem Akkelometer a Gyroskope vum MPU-6050 kann d'Bias a Feeler vun der Sensoren eliminéieren, da gëtt dofir den Effekt vum Geile vun den GeicherDe Kalibrementsprozess besteet normalerweis aus zwee Stänn: statesch Kalibratioun a Bewegungskalibratioun.
Hardware Filteren Prozess: FILTER TASTERVORITORS AN DER MANPULISE MPU-6050 ZE BEZUELT VUN DER PERSONAL BEZUELT BEZUELT.40 nach 4: wärend de Matchbbicher solle se probéieren mpu-6050 Wierder aus der Immobilien an Héichproblellen.
Software Filtering Veraarbechtung: Nodeems Dir d'RAW Daten vu MPU-6050 sammelt, kënne mir e Software Filtering Link derbäi fir d'initial Daten ze eliminéieren fir Geräter ze eliminéieren.Allgemeng benotzt Software Filteren Methode enthalen bedeite filtering, Median Filter, Kalman Filter an sou weider.
Benotzt intern Low-Passfilter: MPU-6050 huet en internen integréierte digitale Lowital-Passfilter, deen benotzt ka ginn fir héich-Frequequising Ersatzfrequenz ze reduzéieren.Besonnell wäert mir de Fäquofffrequenz vum séieren Filmer vum Kliffsregistr um Konst Internets um Konfruucht vun der MPU-6050er änneren fir de héije Frequingskie duerch ze kréien.
Mpu-6050-baséiert Motor Streckverbrauch
De MPU-6050 ass e sechs Achscilerometer a Gyroskop Sensor déi benotzt kënne ginn fir d'Bewegung an d'Haltung vun Objeten ze moossen.Der Motorstrajizitéit op Basis vu MPU-6050 kann duerch déi folgend Schrëtt realiséiert ginn:
Den éischte Schrëtt ass fir d'Sensor Daten ze liesen.Mir mussen d'Beschleuniger a Gyroscope Donnéeën aus dem MPU-6050 Sensuren benotzen, mat passenden Chauffeuren a Bibliothéikfunktiounen.Dës Donnéeën sinn normalerweis aus dem Ausgang an engem digitale Format, sou datt e puer Konversioun a Kalibratiounsbuedratioun Aarbecht ass fir se no aktuellen Miessunge a kierperlechen Unitéiten ze konvertéieren.
Den zweete Schrëtt ass fir d'Beschleunegung ze berechnen.Als éischt muss mir d'Donnéeën aus dem Accessometer kréien fir d'Beschleegung vum Objet an all Achs ze verschécken.Duerno, fir d'Duerchbroch an Verdrängung vum Objet an dëser Aach ze rechnen, mussen eis d'Beschleunigungsdaten integréieren.Numeresch Integratiounstechniken, sou wéi den Eleute vun der Nettger-Kutgermethod, ginn dacks an dësem Prozess benotzt fir d'Reschter vun den Ofkiiregkeet vun den Ofkiirzunge benotzt.
Den drëtte Schrëtt ass fir déi Wénkelgeschwindegkeet ze berechnen.Mat Gyroskopdaten ze benotzen, déi Wénkelgeschwindegkeet vum Objet an all Achs berechent ginn.Erëm, dës Donnéeën mussen kalibréiert sinn an ëmgewandelt fir d'Wénkelgeschwindegkeet an tatsächlech kierperlech Eenheeten ze kréien.
De véierte Schrëtt ass fir d'Rotatioun ze berechnen.Andeems d'Angulär Geschwindegkeet Daten integréiert, de Wénkel vun der Rotatioun vum Objet an all Achs ka berechent ginn.Dëst kann mat der numerescher Integratiounstécker gemaach ginn, sou wéi ELUER Method oder der Längt-Kuta Method ze berechnen fir de Wénkel ze berechnen.
De fënneften Schrëtt ass d'Donnéeën ze fusionéieren.Mir kombinéieren d'Donnéeën aus der Beschleuniger a Gyroskope fir komplett Haltung an Positioun vum Objet ze kréien.Dëst kann gemaach ginn mat Algorithmen wéi Quérenne-baséiert Attitude Léisung oder eeler Wénkel-Léisung.
De sechsten Schrëtt ass d'Resultater ze visualiséieren.Mir konvertéieren de Computert Objet Montiounstreck an eng Rei vu Punkte an engem 3D Koordinat System a weist dat entspriechend Visualiséierung fir e méi intuitive Verständnis vun der Motivatioun vum Objet.
FROEN FROCESS [FAQ]
1. Wéi richteg ass mpu6050?
Déi kréien Resultater, déi manner Upassung op manner wéi 1% fanne kënnen, ugeschalt d'korrekt Dimgoratioun vum Lift Doheem.
2. Wéi liesen Daten aus MPU6050?
Fir den intern MPU6050 Vertrier ze liesen, schéckt de Meeschterpersichen en Ufank vun der ICP Secteulace fir eng Foto, an e schrëftleche Schrëft, an huet d'avinuforméieren, an an e stellt blaich, an an an der Rei.
3. Wou ass mpu6050 benotzt?
A wéckelen Gesondheets-Tracking, Fitness-Tracking Geräter.An Dronen a Quadcopters, MPU6050 gëtt fir Positiounskontroll benotzt.Benotzt beim Kontrollen ze kontrolléieren.Hand Geste Kontroll Apparater.
4. Ass MPU6050 en IMU?
De MPU6050 IMU Sensor Block liest Daten aus dem MPU-6050 Sensor dat mat der Hardware verbonne ass.D'Block noutputenz Beschleunegung, Wénkelstand, an d'Temperatur laanscht d'Achs vum Sensor.
5. Wat ass d'Veraarbechtung vu MPU6050?
Dëst ass de MPU6050's Onboard Prozessor, déi d'Donnéeën aus dem Accelerometer a Gyroskop kombinéieren.Den DMP ass de Schlëssel fir den MPU6050 ze benotzen an am Detail am Detail erkläert.Wéi mat all Mikroprozessors den DMP brauch Firmware fir ze lafen.
Iwwert ons
ALLELCO LIMITED
Liest méi
Séier Ufro
Schéckt eng Ufro w.e.g.

In-Déift Guide op LM317: Verständnis Verdauungsprenzuléierer
op 2024/09/3
Verständnis den TL431: E verständleche Guide fir Präzisioun Shuntulatoren
op 2024/09/3
Populär Posts
-
Wat ass d'GND am Circuit?
op 1970/01/1 3108
-

RJ-45 Connector Guide: RJ-45 Connector Faarfcode, Wiress Schemaen, R-J45 Uwendungen, RJ
op 1970/01/1 2672
-
Stroum Oplëschtung vun Vendagen vun Eliminronik VCC, VDD, VE, VSS, a GND
op 0400/11/15 2211
-

Faser Connectorypen: SC VS LC an LC VS MTP
op 1970/01/1 2182
-

Verglach tëscht DB9 an Rs232
op 1970/01/1 1802
-

Wat ass eng lr44 Batterie?
Elektrocizizieller, dee bulquitesch Kraaft, roueg provozéiert all Asft vun eisem Alldag, vun trivial Gadgeten zu Liewensgeldmoossname medizinesch Ausrüstung, se spillt eng stänneg Ausrüstung.Profau schafft Dir awer dës Energie, besonnesch, besonnesch hätt an aussergewéinlech ob effektiv se ass, ass keng einfach Aufgab.Et kënnt un dësen Hannergrond deen den Artikel ëmmer nach konzentréie...op 1970/01/1 1774
-
D'Fundamenter ze verstoen: Induktiounsbetrag, ankapaktanz
An der strenger Danzerkranzer vun elektrende Dometatiounsrooss, a gouf schëlleg Elementer Macetalen Elementer Maset Carriage Masistenz: Apraktik.All Barten vun all eenzeg Ziktiounen déi den dynamesche Rhythmus vum dynamesche Circulas diktéieren kënnen.Hei, mir stoppen sech un fir d'Klammen vun dëse Komponitiv ze entdecken, fir seng deieraarteg Insele benotzt an dat hannen-elektresch Indeels z...op 1970/01/1 1728
-

CR2430 Batterie ëmfaassend Guide: Spezifikatioune, Uwendungen an Vergréisserung zu CR2032 Batterien
Wat ass cr2430 Batterie?Virdeeler vun cr2430 BatterienNormierCr2430 Batterie UwendungenCr2430 EquivalentCr2430 vs cr2032Batterie Cr2430 GréisstWat fir ze kucken wann Dir de CR2430 an Equivalenten kaaftDateblat pdfOft gestallten Froen Batterien sinn d'Häerz vu klenge elektronesche Geräter.Zu de villenen verfügbaren sinn d'Coa Zellen eng primmesch Roll ze spillen, a Reiser, Beräich ze stellen.T...op 1970/01/1 1676
-
Wat ass rf a firwat benotze mir et?
Radio Frequenz (RF) Technologie ass e Schlësseldeel vu moderner Worklos Kommunikatioun, konstalléiert Daten Iwwerdroung iwwer laang Distanzen ouni kierperlech Statiounen ouni kierperlech Statiounen.Dësen Artikel läscht an d'Grondlage vun der RF, Erkläert wéi elektromagnetesch Stralung (EMR) mécht RF Kommunikatioun méiglech.Mir wäerten d'Prinzipien vun EMR erliichteren, d'Kreatioun a Kontr...op 1970/01/1 1670
-
Ëmfaassend Guide fir an Iwwerweisung ze hfen
Transisteren ginn reuruellen Komponenten an modernen elektronesch Geräter, déi signaliséierend Ofkierzung a Kontroll kréien.Dësen Artikel grees d'Liewe ronderëm d'Wuesstuerm un, ob Dir HF Hormé sréit, wéi Dir Hafen fonnt hutt, an d'Gewéiner Zorte vu Transiste.Duerch eis Explration vun HFFE, mir gewannen e méi staarke Verständnis wéi Iwwergangs an hir Roll an elektronesch Circuiten. Ca...op 5600/11/15 1632
Hotender.
-

DMP6110SSS-13
Diodes Incorporated
MOSFET P-CH 60V 8SOIC
IXFK36N60
IXYS
MOSFET N-CH 600V 36A TO264AA
QTE-040-01-L-D-A-K-TR
Samtec Inc.
CONN HDR 80POS SMD GOLD
CN50A110-24
TDK-Lambda Americas Inc
DC DC CONVERTER 24V 50W
BXB150-24S15FLT
Artesyn Embedded Power
DC DC CONVERTER 15V 150W
LMV822D
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8SOIC
SR70-TP
Micro Commercial Co
TVS DIODE 70VWM 7VC SOT143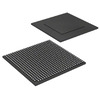
MCIMX6Q4AVT10AD
NXP USA Inc.
IC MPU I.MX6Q 1.0GHZ 624FCBGA
MCP1826S-5002E/AB
Microchip Technology
IC REG LINEAR 5V 1A TO220-3
MCF5251VM140
Freescale Semiconductor
IC MCU 32BIT ROMLESS 225MAPBGA
7-5177986-1
TE Connectivity AMP Connectors
CONN PLUG 40POS SMD GOLD
TPS77315DGKR
Texas Instruments
IC REG LINEAR 1.5V 250MA 8VSSOP
74438324015
Würth Elektronik
FIXED IND 1.5UH 2.2A 99 MOHM SMD
SY100ELT22LZC
Microchip Technology
IC TRANSLTR UNIDIRECTIONAL 8SOIC
SY100H842LZI
Microchip Technology
IC CLK BUFFER 1:4 160MHZ 16SOIC
HCPL0452
onsemi
OPTOCOUPLER SGL TRANS OUT 8-SOIC
TPL0401B-10QDCKRQ1
Texas Instruments
IC DGTL POT 10KOHM 128TAP SC70-6
MC100E457FN
onsemi
IC MULTIPLEXER 3 X 2:1 28PLCC -
MC8641DHX1500KB
NXP USA Inc.
IC MPU MPC86XX 1.5GHZ 1023FCCBGA
K1200E70
Littelfuse Inc.
SIDAC 110-125V 1A TO92
C850-180-WH
Bourns Inc.
SURGE SUPP TBU 180MA 850VIMP SMD
MAX907CSA+T
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 2 GEN PUR 8SOIC
AZ1117H-3.3TRG1
Diodes Incorporated
IC REG LINEAR 3.3V 1A SOT223
IRG7PH44K10D-EPBF
International Rectifier
IGBT W/ULTRAFAST SOFT RECOVERY D
LSF0102DCUR
Texas Instruments
IC TRANSLTR BIDIRECTIONAL 8VSSOP
AT83C26-RKTUL
Microchip Technology
IC INTERFACE SPECIALIZED 48VQFP
AVR-M1005C270MTAAB
TDK Corporation
VARISTOR 27V 4A 0402
3224W-1-501E
Bourns Inc.
TRIMMER 500 OHM 0.25W J LEAD TOP
ADA4851-2YRMZ-RL
Analog Devices Inc.
IC VOLTAGE FEEDBACK 2 CIRC 8MSOP
MAX8952EWE+T
Analog Devices Inc./Maxim Integrated
IC REG BUCK PROG 2.5A 16WLP
LT3050EDDB-5#TRPBF
Analog Devices Inc.
IC REG LINEAR 5V 100MA 12DFN
DMC964020R
Panasonic Electronic Components
TRANS PREBIAS DUAL NPN SSMINI6
CSD25304W1015
Texas Instruments
MOSFET P-CH 20V 3A 6DSBGA
VE-J41-CW
Vicor Corporation
DC DC CONVERTER 12V 100W
TLC7733MFKB
Texas Instruments
SINGLE SVS FOR 3.3V SYSTEMS W/PR
PAQ100S48-3R3/B
TDK-Lambda Americas Inc
DC DC CONVERTER 3.3V 83W -

AD22285-R2
Analog Devices Inc.
ACCELEROMETER 50G ANALOG 8CLCC
XC6VLX195T-2FFG784C
AMD
IC FPGA 400 I/O 784FCBGA
UBX-M8030-CT-B3000A
u-blox
IC GPS GNSS LOW POWER 47WLCSP
ISL59911IRZ
Renesas Electronics America Inc
IC RECEIVER 0/3 32QFN
CEFA203-G
Comchip Technology
DIODE GEN PURP 200V 2A DO214AC
LMP7716MM
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8HVSSOP
C2012C0G2W101K060AA
TDK Corporation
CAP CER 100PF 450V C0G 0805
LM555N
Harris Corporation
TIMER FOR TIMING DELAYS
BCM53406A0IFSBG
Broadcom Limited
12X10G = 12X2.5G SERDES SWITCH
170M2619
Eaton - Bussmann Electrical Division
FUSE SQUARE 315A 700VAC RECT
ISL6594ACRZ-T
Intersil
HALF BRIDGE BASED MOSFET DRIVER,
S-1000N25-I4T1G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SNT-4A
PTFB193404F-V1-R250
Wolfspeed, Inc.
IC AMP RF LDMOS
THGBMNG5D1LBAIT
Kioxia America, Inc.
IC FLASH 32GBIT EMMC 153WFBGA
AM26LS31CD
Texas Instruments
IC DRIVER 4/0 16SOIC
TZM5250B-GS08
Vishay General Semiconductor - Diodes Division
DIODE ZENER 20V 500MW SOD80
1N3263
Solid State Inc.
DIODE GEN PURP 200V 275A DO9
MAX5258EEE+
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 16QSOP